|
����ѩ��·��ʪ��������£���ʻ������һ���dz�Σ�յ����顣��Ȼ����ȫʱ������������̥��װ���ij������ٿ��Ի�������һЩ�����������٣��������ٺͼ�ɲ����Ȼ��ѩ���ʻ�ĸ���ԭ��������ڼ�ʻ�����������ѵ����ڱ���ѩ���ǵ�·���Ϸֱ�������ǵ�·���Ծ����Զ���ʻ���ܵij�����˵����ѩ�����µĵ�·ʶ��������ʰ�Ĵ��ڡ�  ����ѩ���ǵĵ�·�����ڼ�ʻԱ�۲�·�����������Ӱ������ͷ��ȡ·����Ϣ�� ����ѩ���ǵĵ�·�����ڼ�ʻԱ�۲�·�����������Ӱ������ͷ��ȡ·����Ϣ��
�������궬��������չ����Զ��������³����Զ���ʻ����������о���ͨ������Ъ����ѧ��������ͬ����һ���ܹ�Ӧ����ѩ��������������Զ���ʻϵͳ��  ���������з�һ�������ڴ�ѩ�ȶ��������µ��Զ���ʻϵͳ�� ���������з�һ�������ڴ�ѩ�ȶ��������µ��Զ���ʻϵͳ��
�����ڽ��ܸ�������ϵͳ֮ǰ����������Ŀǰ�������Զ���ʻ�����������ι����ģ����������Զ���ʻ�̶���ߵ���˹��Ϊ����������Autopilot����֮����ͨ������ͷ�ɼ��ij�������Ϣ��ȷ����ʻ�켣����ͨ�����״��ȡ��Χ��������ʻ״̬���Ӷ��������������ʻ�ٶȡ� 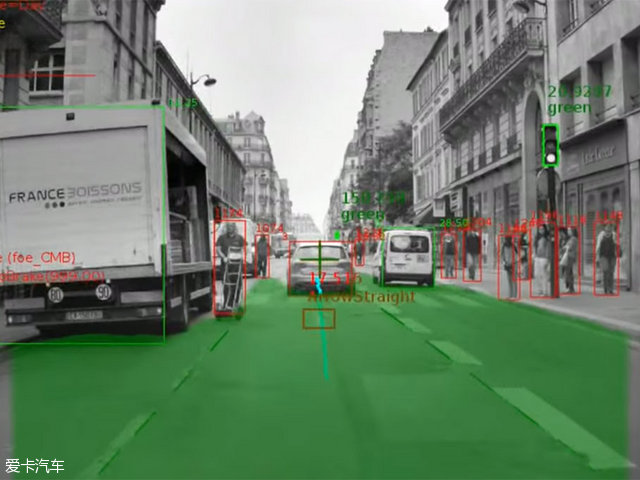 Ŀǰ�������Զ���ʻ��������У�����ͷ��ȡ����Ϣ����������Ҫ�����á� Ŀǰ�������Զ���ʻ��������У�����ͷ��ȡ����Ϣ����������Ҫ�����á�
����Ҳ����˵���������ͷ��ס��Ŀǰ���������ϵ��Զ���ʻ���ܣ���ʵ�Ǹ���ʻ�������ܣ�Ϊ�˷�������������ʱ�������Զ���ʻ��������**�������ġ���ʵ������Ҫ��Щ��������֮ǰ����˹���IJ����з��֣���ʹû�е�ס����ͷ������ʻ��·�ڵȳ�������ʧ�Ļ����£�����Ҳ�ᷢ���������Զ��˳��Զ���ʻģʽ��������Ϊ�Զ���ʻϵͳû��ͨ������ͷ��ǰ���ij�����Ϣ��  ͨ�������״��ȡ�ĸ߾���3D��ͼ��Ϣ�� ͨ�������״��ȡ�ĸ߾���3D��ͼ��Ϣ��
�������Ը��ش��㿪��һ�ײ���������ͷҲ�������������Զ���ʻϵͳ������ϵͳ�����Ϸ�Ϊ����ʵ�ָù��ܡ� �����������������õ�����£�û�д�ѩ������Χ�������ͨ�������״��ռ���Χ�����Ļ�����Ϣ��ʹ�õļ����״�ÿ������ռ���280������л�����Ϣ�ļ���㣬ÿСʱ���ռ���600G����Ϣ���ݡ������Ƶĸ߾���3D��ͼ�в���������·���������������߸ˡ�����Ͱ�ȶ��ܼ�¼�ڵ�ͼ�С� 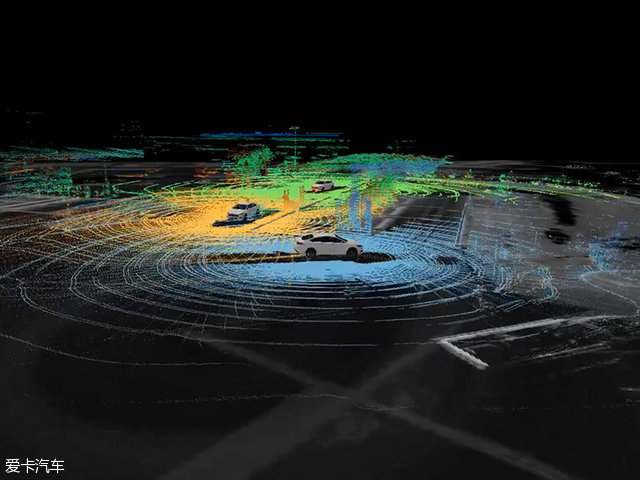 ���Զ���ʻʱ���������ٴ�ͨ�������״��ȡ��Χ200m�ĵ�ͼ��Ϣ�� ���Զ���ʻʱ���������ٴ�ͨ�������״��ȡ��Χ200m�ĵ�ͼ��Ϣ��
����ӵ�и߾��ȵĵ�ͼ�Ϳ��Խ��г������Զ���ʻ�ˡ�����ʻʱ���Զ���ʻϵͳ���ٴ�ͨ�������״������Χ200m������Ϣ��֮������ݿ���3D��ͼ���бȶԣ��Ӷ����������������λ�á��ݸ��سƣ�ͨ�����ֵ�ͼ�ȶԵķ�ʽ����λ���������1cm���ڣ��������Զ������ȶԶ�λ����Ҫ��ϸ߹��ܵ����� 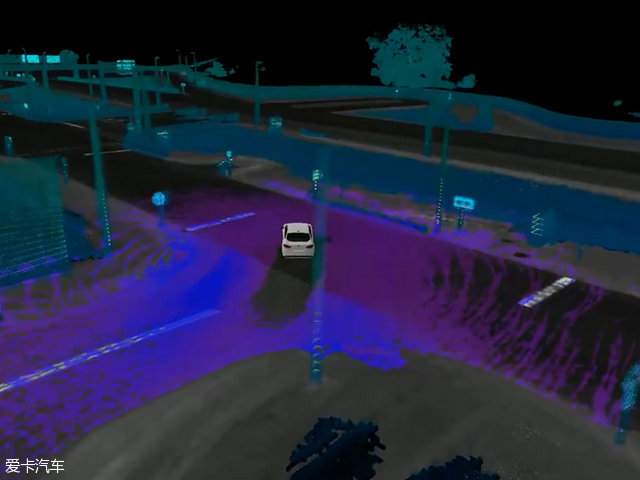 ����ȡ���Ļ�����Ϣ�����ݿ��е�3D��ͼ���бȶԣ��Ӷ������������ǰλ�á� ����ȡ���Ļ�����Ϣ�����ݿ��е�3D��ͼ���бȶԣ��Ӷ������������ǰλ�á�
�����༭���������ʵ�����ʵ���Զ���ʻ��һ���£��ڱ���ѩ���ǵĵ�·��ʵ���Զ���ʻ������һ�����ˡ���Ϊ����ͨ������ͷ����ȡ����ʻ��Ϣ����������֧�ֳ���ʵ���Զ���ʻ�����Բ��ò�ͨ����һ�ַ�ʽ�ֲ�ȱʧ����Ϣ������ͨ�������״���Ƹ߾��ȵ�ͼ�ķ�ʽ���������⣬��Ȼ����ʵ�ֵ�Ч���ܺã��������״�߰��ijɱ����»��Ϊ�����ƹ�ʱ����·����
|  ����Ա
����Ա











 |�ֻ���|С����|Archiver|����������11010702001337|
�����س��ѻ�
( ��ICP��13016835��-3 ����������11010702001337 )
|�ֻ���|С����|Archiver|����������11010702001337|
�����س��ѻ�
( ��ICP��13016835��-3 ����������11010702001337 )





 IP��
IP�� ���п�
���п�
 ������
������ �ö���
�ö��� ��Ĭ��
��Ĭ�� ������
������ ��ɫ��
��ɫ�� ������
������